基于视觉信息的汽车主动安全辅助系统
- 成果编号
- 27324
- 完成单位
- 南京理工大学
- 完成时间
- 未填写
- 成熟程度
- 试生产阶段
- 价格
- 面议
- 服务产业领域
- 装备制造
- 单位类别
- 211系统院所


| 科技计划 | 成果形式 |
|---|---|
| 新技术 | |
| 合作方式 | 参加活动 |
技术转让、技术开发、技术入股 |
2021年高校院所走进镇江产学研合作对接活动 首届江苏产学研合作对接大会 |
| 专利情况 | |
未申请专利 |
| 综合介绍 |
|---|
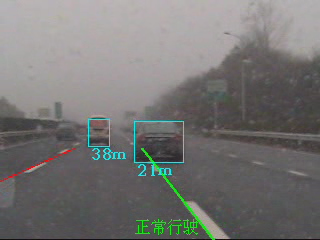
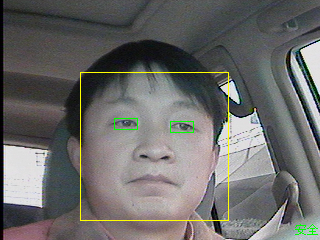
传统的针对冲撞后乘员保护的技术和措施,已经远远不能满足现代交通对汽车安全性的要求,把以冲撞安全为核心的传统汽车被动安全技术,发展为以预防为核心的现代汽车主动安全技术是有效降低交通伤亡,减少重大交通事故的有效手段。车辆主动安全辅助系统正是针对这一需求,在我国率先采用低成本的单目视觉方法,实现基于视觉信息处理的行道线检测及偏离预警、前方车辆检测及防撞预警、盲区检测及预警、驾驶员疲劳状态检测。 |
| 创新要点 |
| 技术指标 |
(1)行道线检测及偏离预警,正确报警率为>94%; (2)前方车辆检测及防撞预警,正确报警率>92%; (3)盲区检测及预警,正确报警率>90%; (4)驾驶员疲劳状态检测,正确报警率>93%。 |
| 其他说明 |
| 姓名 | 对接成功后可查看 | 所在部门 | 对接成功后可查看 |
|---|---|---|---|
| 职务 | 对接成功后可查看 | 职称 | 对接成功后可查看 |
| 手机 | 对接成功后可查看 | 对接成功后可查看 | |
| 电话 | 对接成功后可查看 | 传真 | 对接成功后可查看 |
| 邮编 | 对接成功后可查看 | 通讯地址 | 对接成功后可查看 |
| 姓名 | 对接成功后可查看 | 所在部门 | 对接成功后可查看 |
|---|---|---|---|
| 职务 | 对接成功后可查看 | 职称 | 对接成功后可查看 |
| 手机 | 对接成功后可查看 | 对接成功后可查看 | |
| 电话 | 对接成功后可查看 | 传真 | 对接成功后可查看 |
| 邮编 | 对接成功后可查看 | 通讯地址 | 对接成功后可查看 |