感维智能—机器人融合感知技术产业化
- 成果编号
- 39168
- 完成单位
- 哈尔滨工业大学
- 完成时间
- 未填写
- 成熟程度
- 批量生产阶段
- 价格
- 面议
- 单位类别
- 985系统院所

| 科技计划 | 成果形式 |
|---|---|
| 合作方式 | 参加活动 |
| 第二届江苏产学研合作对接大会 | |
| 专利情况 | |
未申请专利 |
| 综合介绍 |
|---|
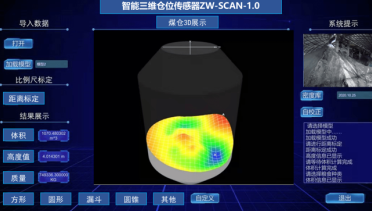
采用多传感器融合核心算法,根据多传感器数据融合的定位建图问题,突破点线特征融合技术、相机-激光雷达融合技术、系统因子图优化技术以及重投影模型构建技术。优化结构线特征匹配算法,弥补点特征在无纹理环境下跟踪不稳定、特征数量不足的缺陷,提升系统的鲁棒性。提高室内场景感知导航精度至±2cm,室外场景感知导航精度至±3cm,实现大范围场景环境感知建图。提取相机RGB信息,与激光雷达融合,恢复三维物体深度,构建云端语义库,对室内外未知复杂环境进行语义挖掘及场景稠密重建,用于场景识别及智能机器人的自主决策。目前还可以通过传感器联合标定技术有效去除畸变点云。采用点云修正技术修正防爆带来的数据畸变和反射强度、精度损失,产品获得防爆合格认证,目前在防爆激光雷达细分领域国内应用客户数第一。 |
| 创新要点 |
| 技术指标 |
| 其他说明 |
| 姓名 | 对接成功后可查看 | 所在部门 | 对接成功后可查看 |
|---|---|---|---|
| 职务 | 对接成功后可查看 | 职称 | 对接成功后可查看 |
| 手机 | 对接成功后可查看 | 对接成功后可查看 | |
| 电话 | 对接成功后可查看 | 传真 | 对接成功后可查看 |
| 邮编 | 对接成功后可查看 | 通讯地址 | 对接成功后可查看 |
| 姓名 | 对接成功后可查看 | 所在部门 | 对接成功后可查看 |
|---|---|---|---|
| 职务 | 对接成功后可查看 | 职称 | 对接成功后可查看 |
| 手机 | 对接成功后可查看 | 对接成功后可查看 | |
| 电话 | 对接成功后可查看 | 传真 | 对接成功后可查看 |
| 邮编 | 对接成功后可查看 | 通讯地址 | 对接成功后可查看 |